1. Introduction
A lot of micrometeorological observations using fast response
sensors have been carried out to understand the energy and water balances
and CO
2 flux on different places. Though different sensors were
used, comparisons of these sensors have been rarely seen. During May 14 to
25, 2000, turbulent measurement with 14 different models of sensors, most
of which were used in the observations of GAME (GAWEX Asian Monsoon Experiment)
projects, was carried out at Terrestrial Environment Research Center (TERC),
Universityof Tsukubaby the Flux Enthusiast Party (authors). Our interests
are the energy imbalance problem, flux footprint (or source area), methods
to evaluateturbulent fluxand comparison of the different turbulent measuring
sensors(Toda et al.,2000). The object of this report is focused on comparison
of the sensors.
2. Measurement
Site The measurement was made at TERCfield.The
surface was covered by grass (mainly
Solidago altissima,
Andropogon
virginicusand
Equisetum arvence). And thefetch toward the prevailingwind
direction(east) was about 100m.
Sensors Table 1 lists the installed sensors to
compare. Because of bad weather conditions (lightning and heavy rain), only
the data obtained by 6 sensors is available. Every open path sensor measures
spatial mean properties of the air between probes. The sonic anemothermometers
calculates wind speed and air temperature by measuring the speed of sound,
and gas analyzers calculate the gas densities by measuring the absorption
of infrared radiation. The spans of all the sensors’ probes are 0.12m
to 0.2m except closed path sensor. Shorter span sensors enable to measure
smaller eddies, but errors are larger. Closed path system pumps the object
air into the sampling cells of the sensor through tube, and calculates the
gas concentrations by measuring the difference in absorption of infraredradiation
passing trough the sample and reference cells. The sensors were installed
atheights of 2.5 to 3.3m, and the horizontally distance of eachset was around
0.3m. A sampling frequency set at 10Hz.
Table 1 Available installed sensors.Italics are
the abbreviations used in figures.
|
Set no. (Logger)
|
Model
|
Sensor [Object]
|
Installation height
|
Span
|
|
1(a)
|
Flux-PAM type*
|
3D sonic anemothermometer [Temperature]
|
3.33m
|
0.15m
|
|
2(b)
|
DA-600-1T**
|
1D sonic anemothermometer [Temperature]
|
2.55m
|
0.20m
|
|
3(b)
|
DA-600-3T**
|
3D sonic anemothermometer [Temperature]
|
2.52m
|
0.20m
|
|
1(a)
|
OP2***
|
Open path CO2/H2O gas analyzer
[H2O, CO2] |
3.30m
|
0.20m
|
|
2(a)
|
LI-7500****
|
Open path CO2/H2O gas analyzer
[H2O, CO2] |
2.80m
|
0.12m
|
|
1(a)
|
LI-6262****
|
Closed path CO2/H2O gas analyzer
[H2O, CO2] |
2.85m
|
(tube)
|
[Makes]
*: GILL,
**: KAIJO,
***: Data Design
Group,
****: LI-COR
3. Comparison
It is difficult to compare raw data of the sensors, because
each set of sensors is apart horizontally. Thus standard deviations (\sigma)
in every 10 minutes were used to make comparisons. The concentrations are
converted into the densities.
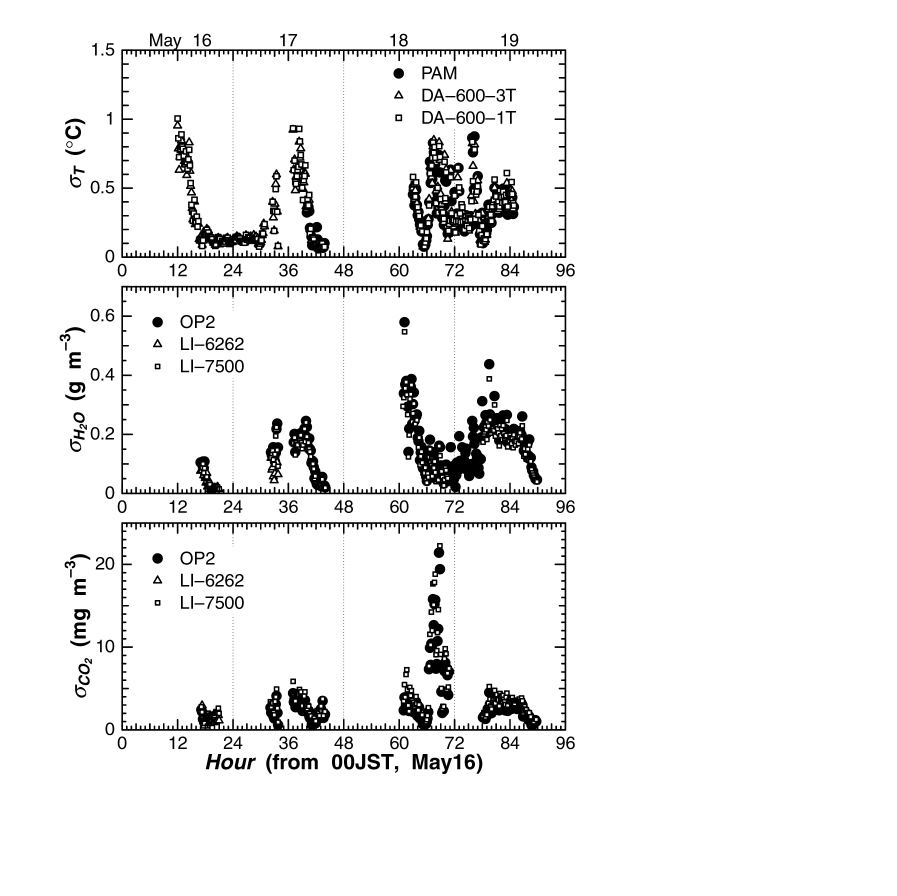
Fig.1 shows time series on \sigma
of the available data. They agree with each other. The weather of the former
two days isfiner than the latter, so everys varied more regularly in theformer
days.
Fig.2 shows the relationships
between \sigma of the sensors. This figure also shows good agreement of the
sensors. Theclosed path LI-6262 sensor is a little smaller in both H
2O andCO
2 because of the measuring method. Slightly curving
relationship between the \sigma of H
2O
OP2 and H
2O
LI-7500 is seen in this figure, maybe because only
theOP2’s H
2O sensor has 2nd order calibration coefficient
(othershave only linear). LI-7500’s calibration coefficients are questionable,
therefore \sigma of CO
2 LI-7500 seems quite larger.
However the root mean square error (RMSE) of two open path sensors seems
smallenough. These results mean thatthe sensors in this reportare good to
usetogether, although not only absolute quantities but also \sigma calibration
should be made before flux observations using different turbulent measuring
sensors.
Acknowledgments The authors would like to thank KAIJO Co. and
Meiwa Shoji Co. for their providing instruments, and Dr. N. Saigusa of the
National Institute for Resources and Environment for her kindly lending data
logger.
References
Toda, M., I. Tamagawa, S. Miyazaki, D. Matsushima, J. Gotoh, T. Miyamoto,
2000: Intensive turbulent flux observation -the flux enthusiast party-. J.
Japan Soc. Hydrol. & Water Resour. (in Japanese), 13, 396-405.
{kind=link}
{kind=link}